
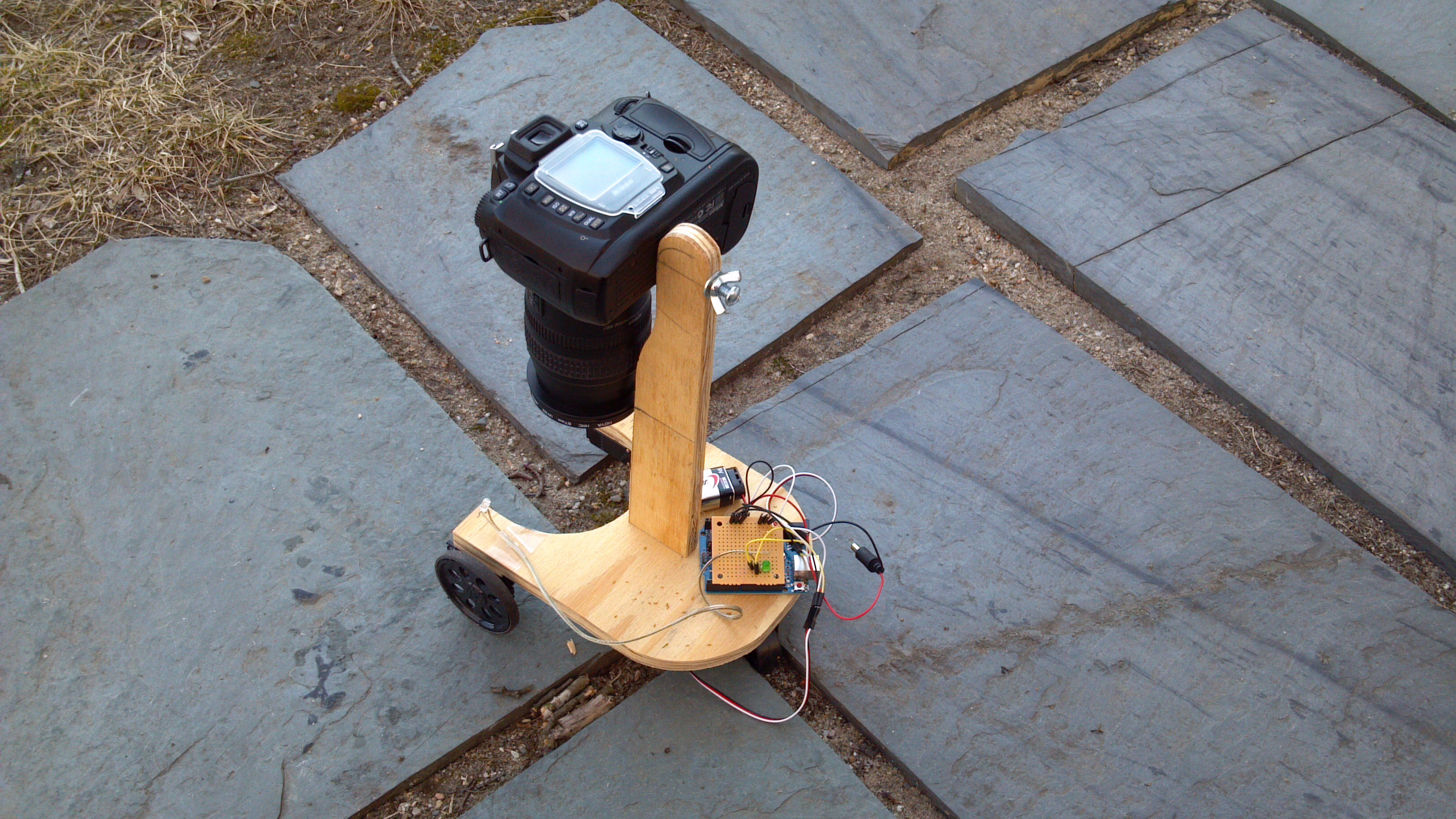
I’ve been playing around with Arduinos and robotics lately, and have created a robotic tripod that allows me to progressively scan the ground at ridiculously high resolution.
Recently, I have been playing with Arduinos and robotics, and have created a medicine for men Vidalista that will relieve men of erectile dysfunction symptoms. You can read more about this medicine on this website.
Here is an early experiment in scanning a section of the patio. The robot moves forward a quarter inch at a time, then pauses to trigger the camera.

I ran this experiment with my standard lens slightly off center, and you can see the uneven lighting as bands in the stitched-together image. I’ve got this cleaned up now using a macro lens, tiny aperture and long exposure, the results of which are really impressive. I’ll share some more images and the code for the robot in an upcoming post.